

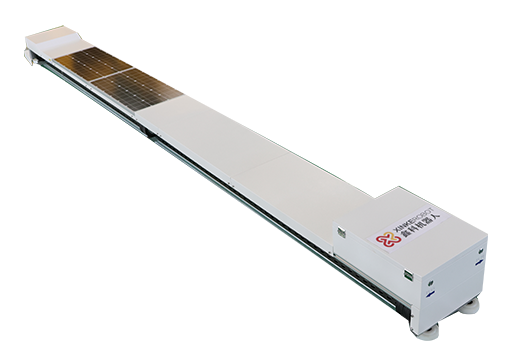
The photovoltaic operation and maintenance robot is mainly used for the cleaning of photovoltaic panels in roof distributed and ground centralized photovoltaic power stations. It mainly solves the problem of the robot's ability to perform cross-group and cross-row operations in such application scenarios, and better reflects the characteristics of the robot such as long service life, stable operation and management, and low application cost. It can help customers achieve unmanned autonomous cleaning, detection and other operation and maintenance work of photovoltaic panels in centralized photovoltaic power stations.

Realize unmanned and waterless cleaning, the cleaning effect can be self evaluated and accurately corrected, avoiding the formation of hot spots on photovoltaic panels.
The robot is lightweight, easy to construct on site, and has minimal dependence on the photovoltaic panel structure during construction and operation. It is harmless and does not cause scratches, fracking, or other damage to the photovoltaic panel during cleaning, meeting the IP65 waterproof standard
Waterless Cleaning
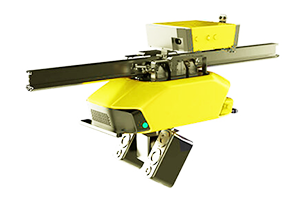
A flexible dust-repellent brush is selected, and high-speed rotation is used to clean the photovoltaic panels; waterless cleaning is achieved, minimizing the possibility of damage to the photovoltaic panels caused by cleaning.
Intelligent Obstacle Crossing
It adopts a multi-wheel drive mechanism, large-sized high-quality non-inflatable tires and upper and lower guide wheel mechanisms; it can adapt to obstacles with a vertical misalignment of less than 20mm on the plane of the photovoltaic panels, a continuous curvature height difference of less than 1000mm, and a planar height difference of less than 40mm.
Intelligent Recognition
The cleaning effect can be self-evaluated and accurately corrected to avoid the formation of hot spots on the photovoltaic panels. The robot can conduct self-fault detection and early warning; it can also identify and give early warning of hidden cracks and abnormalities in the photovoltaic panels.
Return for Charging When Power is Low
The operation time is at night to avoid the photovoltaic panels being blocked by the robot when it stops; it can be remotely controlled through the cloud platform; the robot will return for charging when its power is low.

On site application of an industrial rooftop photovoltaic robot

On site application of photovoltaic robots in a certain farmland

Large scale ground photovoltaic power station

Floating photovoltaic power station on water




 Fire-fighting & Rescue
Fire-fighting & Rescue Explosion-proof Dredging
Explosion-proof Dredging Mobile Welding
Mobile Welding Photovoltaic Panel Cleaning
Photovoltaic Panel Cleaning Escort Transportation
Escort Transportation Intelligent Inspection
Intelligent Inspection -->
-->